
pycharm格式化快捷键失效解决
pycharm格式化快捷键失效解决pycharm格式化代码快捷键pycharm自带代码格式化快捷键Ctrl+Alt+L,一键标准化你的代码,专治强迫症。
修改前
修改后
在使用期间发现Ctrl+Alt+L突然不好使了,找了许久都没找到啥问题,有说插件的问题有说IDE的问题,结果……..
最后发现…….是网易云音乐也有这个快捷键,修改了之后好了
所以,就是和某个软件的快捷键冲突了……..习惯了一边听音乐一边写代码(网易云一堆收藏的歌曲,晕),一时间的没有想到快捷键冲突问题

Linux系统卡死解决方法
今天在用ubuntu编译安装的时候,结果编译一半的时候却卡死了,强忍着伤硬盘的心痛去强行关机,但突然想到ubuntu有个强行重启的快捷键,不像Windows卡死只有去按电源键。
ubuntu强行重启快捷键
1按住alt和SysRq键的同时,再输入reisub,输入完b之后,系统自动重启;输入的一切都会直接交给Linux内核来处理。
总结:
123456Alt+SysRq+r 把键盘从X手中夺过来Alt+SysRq+e 终结所有进程Alt+SysRq+i 强制关闭所有进程Alt+SysRq+s 同步所有挂载的文件系统Alt+SysRq+u 重新挂载所有的文件系统为只读Alt+SysRq+b 重启

Python中的 if __name__ == __main__到底是个啥子意思?
在看别人代码时经常会看到if __name__ == “main“,这时心里就想不写这句话,代码不照样能跑
我刚开始运行别人代码时也是一直疑惑,直到我翻了几篇关于__name__ == “main“,终于明白了
通过例子来理解:只要你创建了一个模块(一个.py文件),这个模块就有一个内置属性name生成,该模块的 name 的值取决于如何应用这个模块。说人话就是,如果你直接运行该模块,那么__name__ == “main“;如果你 import 一个模块,那么模块name 的值通常为模块文件名。
如,创建一个test1.py:
def func(): print(‘hello, world!’)
if name == “main“: func()
模块中,首先定义了函数func(),用来打印出hello, world!,然后判断__name__ 是否等于 __main__,如果等于,有打印,反之则反,现在运行该模块,结果为:
hello, world!
说明__name__ 等于 __main ...

VMware 15pro 虚拟机配置教程(虚拟机安装ubuntu)
*前面给大家讲过VMware 15pro 的安装过程*,这期就说一下怎么对虚拟进行配置(装系统),这里说明一下,在这一期里我使用的是VMware 16pro软件*,界面是没有很大的区别一样可以一步一步参照来进行配置*,因为我电脑已经安装了虚拟机所以上期只能在别人的电脑进行安装然后…….
具体配置:一、镜像下载要虚拟运行起来,首先就要有一个镜像文件,没有这个文件,打卡虚拟机也是在那里光瞪眼,VMware支持的镜像有很多种,可以是我们实机安装的ISO文件也可以是别人配置好的虚拟机文件。那这些文件在那里下载?放心都给你列出来了。1、我告诉你:一个系统镜像网站,都是纯净版的系统。官方镜像:2、ubuntu:https://ubuntu.com/3、centos:https://www.centos.org4、deepin:https://www.deepin.org/zh/5、本文用到的系统文件(ubuntu18.04):链接:https://pan.baidu.com/s/1Jb-0yIH-Agj0firVZTwgqw提取码:qkbj6、配置好的ubuntu18.04系统文件链接:https ...
windows10 + VMware 15pro 虚拟机安装教程
介绍:一、百度百科虚拟机(Virtual Machine)指通过软件模拟的具有完整硬件系统功能的、运行在一个完全隔离环境中的完整计算机系统。在实体计算机中能够完成的工作在虚拟机中都能够实现。在计算机中创建虚拟机时,需要将实体机的部分硬盘和内存容量作为虚拟机的硬盘和内存容量。每个虚拟机都有独立的CMOS、硬盘和操作系统,可以像使用实体机一样对虚拟机进行操作。
简单来说就是电脑中的电脑。
虚拟机软件有很多种,这里介绍的是VMware虚拟机,个人觉得这款虚拟机软件是比较好用的一款,也推荐大家使用。
VMware虚拟机官网:https://www.vmware.com/
VMware虚拟机下载官网:https://www.vmware.com/products/workstation-pro/workstation-pro-evaluation.html
目前官网上的版本是16 pro的版本,这里是使用15 pro版本的,15pro目前比较稳定,而16pro听说会出现各种的小毛病,但博主使用的16 pro使用期间也没有出现过什么问题,但还是建议入门还是安装15pro版本的。
好了,废话不多 ...

ubuntu16.04上安装Apollo 5.0 超详细版本
Apollo:Apollo 文档介绍:Apollo加载了新的模块和功能,但是在旋转之前,需要对其进行完美的校准和配置。请详细检查先决条件和安装步骤,以确保您具备构建和启动Apollo的能力。您也可以查看Apollo的体系结构概述,以更好地了解Apollo的核心技术和平台。
Apollo软件安装官方教程Apollo官方构建教程Apollo 5.0快速入门指南Apollo代码下载的两个网站:git clone https://github.com/ApolloAuto/apollo.git(这个下载比较慢,github对国内的影响,但推荐使用)Gitee下载链接:git clone https://gitee.com/ApolloAuto/apollo.git(这个是国内下载源,下载很快)
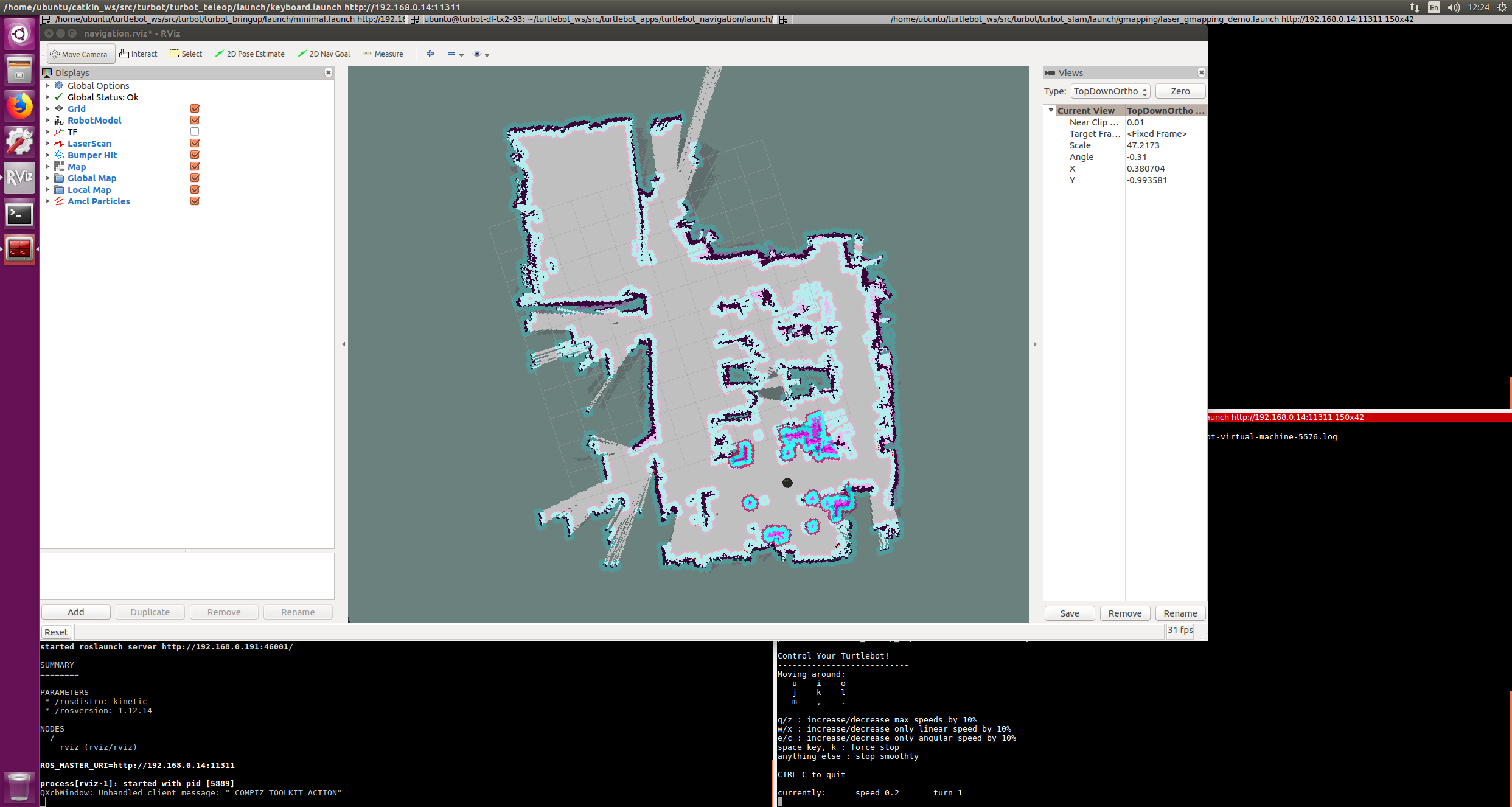
来欣赏一段apollo的运行视频:
[video(video-5w49JdqD-1617255881728)(type-bilibili)(url-https://player.bilibili.com/player.html?aid=887402668)(image-https://ss.csdn.n ...
这是建站写的第一篇文章
testtesttesttesttest钉钉消息测试
这里有什么?
完!
公告



数据库加载中